On sait que la lumière va d’un point à un autre par le chemin le plus rapide (principe de Fermat). Lors du passage d’un milieu d’indice n1 à un milieu d’indice n2, on a n1 sin u1 = n2 sin u2, or la vitesse de la lumière valant c∕n, on en déduit
|
| (1) |
Par ailleurs, la conservation de l’énergie implique
 | (2) |
Par conséquent on en déduit
 | (3) |
et
 | (4) |
donc
 | (5) |
Un simple dessin montre que ẏ =  = tan(π∕2 - u) = cot u, et cot 2u =
= tan(π∕2 - u) = cot u, et cot 2u =  - 1 donc
- 1 donc
 | (6) |
on obtient par conséquent l’équation différentielle caractéristique de la trajectoire
 | (7) |
On pose ẏ = cot  et on trouve
et on trouve
 (figure 1).
(figure 1). On peut à présent déterminer le temps de parcours du point A (θ = 0) au point B (θ = θB) :
 | (10) |
or
![∘ --------------------------------
∘ ---2-----2 2 2 2 ∘ ------------
ds = dx + dy = R [(1 - 2cos θ + cos θ) + sin θ]dθ = R 2(1 - cosθ)dθ](brachis14x.png) | (11) |
donc avec (2) et (9) on obtient
 | (12) |
Remarque : autant il est facile de trouver x et y à partir de R et θ, autant l’inverse est compliqué. Le programme 2.1 permet de retrouver les paramètres R et θ à l’aide d’une méthode de minimisation incluse dans le logiciel Octave. Une autre approche basée sur l’utilisation de la méthode de Newton-Raphson peut être utilisée [3].
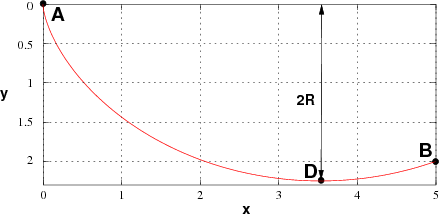
Exemple : on cherche la brachistochrone entre les points A(0, 0) et B(5, 2) (coordonnées exprimées en mètres). Le programme 2.1 donne comme résultats R = 1, 1244 m, θ = 3, 8197, et un temps de trajet de 1.2931 s.
|
Il est possible de trouver une solution approchée en utilisant les fonctions de minimisation fournies dans les tableurs ou les logiciels de calcul. Le principe du calcul est le suivant :
 ,
,
 par Δsk =
par Δsk =  ,
,
Le programme 2.2 pour Octave réalise ces différentes étapes (minimisation à l’aide de la fonction sqp).
|
On peut ensuite vérifier graphiquement que l’on retrouve un résultat proche de celui obtenu avec le programme précédent (et aussi comparer le temps estimé du trajet, ici pour des points identiques à l’exemple de la partie 2.2 on trouve t = 1, 3072 s.
En partant du point d’altitude y = y0 (le cercle générteur a tourné de θ0), la vitesse s’exprime comme
 | (13) |
donc avec dt = ds∕v, le temps pour aller du point C (x0,y0) au point D le plus bas (θ = π) est
 | (14) |
soit encore en posant u = cos  (et u0 = cos
(et u0 = cos  )
)
![∘ --- ∘ --- ∘ ---
R ∫ u0 du R [ x ]u0 R
t = 2 -- ∘---------= 2 -- arcsin --- = --π
g 0 u20 - u2 g u0 0 g](brachis23x.png) | (15) |
donc le temps pour atteindre le point le plus bas ne dépend pas du point de départ, c’est une courbe tautochrone !
Cette propriété se déduit de la tautochronie, la période du pendule cycloïdal vaut T = 4 π = 2π
π = 2π ,
elle est indépendante de l’amplitude des oscillations. Par ailleurs, cela correspond bien à la période d’un
pendule simple de longueur 2R dans l’approximation des faibles amplitudes d’oscillation (le cercle
osculateur à la cycloïde en son point le plus bas à pour rayon 2R).
,
elle est indépendante de l’amplitude des oscillations. Par ailleurs, cela correspond bien à la période d’un
pendule simple de longueur 2R dans l’approximation des faibles amplitudes d’oscillation (le cercle
osculateur à la cycloïde en son point le plus bas à pour rayon 2R).