|
|
À partir des équations (13) et (15) on peut tracer y = f(x) (figure 2).
Si on s’intéresse à la distance horizontale d parcourue par le projectile, il faut tout d’abord déterminer l’angle αs pour lequel y s’annule. On peut utiliser pour cela un algorithme de type Newton, en partant d’une valeur initiale αs = -α0 qui correspond au cas sans frottement. On applique alors la formule
 | (20) |
jusqu’à ce que la valeur |αk+1 - αk| soit inférieure à une valeur fixée à l’avance, par exemple 0, 01∘. Une fois αs déterminé, on calcule d = x(αs) - x0 à l’aide de l’équation (15), ce qui correspond à la distance parcourue horizontalement.
On peut constater d’après (20) que αs ne dépend en fait que de α0 et du rapport v0∕vlim que l’on appelera désormais vitesse normalisée et que l’on notera vnorm. De même, si on normalise d par la distance parcourue en l’absence de frottement, à savoir
 | (21) |
alors dnorm = d∕dref est uniquement une fonction de α0 et de vnorm, cette quantité normalisée peut par conséquent être calculée indépendamment de la valeur du rapport λ∕m. On obtient donc un résultat général à partir duquel l’influence des différents paramètres pourra aisément être étudiée. La distance normalisée est représentée sur la figure 3.
|
|
Afin de pouvoir étudier facilement dnorm, nous allons chercher à paramétriser cette fonction. Pour α0 fixé, on observe que l’on peut décrire dnorm en fonction de vnorm à l’aide d’une fonction de Pearson VII (voir la figure 4 pour α0 = 45∘) :
 | (22) |
Pour M = 1, cette fonction est une lorentzienne, et pour M →∞, il s’agit d’une gaussienne (cf. annexe A).
|
|
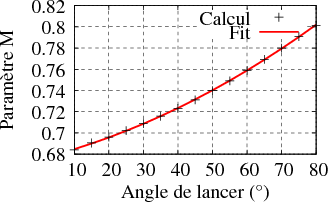
Les paramètres K et M sont donc des fonctions de α0, leurs variations respectives sont représentées sur les figures 5(a) et 5(b).
Ces paramètres peuvent facilement être décrits par des polynômes PN(α0) = ∑ i=0i=Na iα0i de degrés 3 et 2, dont les coefficients ai sont donnés dans la table 1.
|
À l’aide des coefficients de la table 1 et de l’équation (22), on retrouve les valeurs calculées pour obtenir la figure 3 avec une erreur relative inférieure à 0, 2%. On peut donc considérer que le calcul de la distance parcourue par un projectile a été considérablement simplifié par rapport au problème initial qui consistait à utiliser les équations (15) après avoir résolu (20). Les influences respectives de v0, vlim et αO peuvent donc à présent être étudiées sans difficulté.
Nous nous intéressons à l’influence de l’angle de lancer sur la distance parcourue. En l’absence de frottement, la distance est donnée par la formule (21), elle est donc maximale pour α0 = 45∘, et la distance parcourue sera la même pour α0 = 45∘ ± φ, φ variant entre 0 et 45∘. Si l’on tient compte des frottements, la distance parcourue n’est plus symétrique par rapport à α0 = 45∘, une étude rapide de la figure 3 semble indiquer que la distance sera plus grande pour les angles inférieurs à 45∘, ce qui est généralement ce que nous dicte notre intuition. Si cela est bien exact pour notre étude comme on le verra par la suite, il faut cependant se méfier de l’intuition pour des frottements en vn avec n ≥ 3, 5 car l’angle optimal de lancer peut alors être supérieur à 45∘ [14].
Dans le cas présent, à partir du travail effectué dans la partie 3.2, il est facile de calculer d pour v0 fixé en faisant varier l’angle α0, puis de voir pour lequel de ces angles d est maximal. Nous avons effectué le calcul pour une balle de baseball avec λ∕m = 0, 005376 m-1, soit v lim = 42, 7 m⋅s-1 [7, 12] et v 0 = vnorm.vlim, le résultat est présenté figure 6.
|
|
On constate bien que lorsque v0 augmente, l’angle permettant d’obtenir la distance maximale diminue. La
forme de la courbe nous incite à chercher une loi de comportement une nouvelle fois décrite pour une loi de
Pearson : αmax = h -M. On impose h = 45∘, et l’optimisation des deux autres paramètres
conduit à K = 0, 0085864 s⋅m-1 et M = 0, 1366571, ce qui donne une erreur relative maximale inférieure
à 0, 08% ! Le choix de cette fonction est donc validé.
-M. On impose h = 45∘, et l’optimisation des deux autres paramètres
conduit à K = 0, 0085864 s⋅m-1 et M = 0, 1366571, ce qui donne une erreur relative maximale inférieure
à 0, 08% ! Le choix de cette fonction est donc validé.
Le lecteur curieux pourra vérifier qu’à l’aide des paramètres donnés dans la partie 3.2, il obtiendra
aisément les résultats relatifs aux valeurs utilisées dans la référence [5], avec cependant un léger écart dû au
fait que le rapport v0∕vlim dans cet ouvrage ( ≈ 3, 16) est près du double de la valeur maximale
considérée ici pour la détermination des paramètres d’interpolation (1, 5).
≈ 3, 16) est près du double de la valeur maximale
considérée ici pour la détermination des paramètres d’interpolation (1, 5).