L’expression la plus générale d’une conique dans le repère (xOy) est :
|
| (51) |
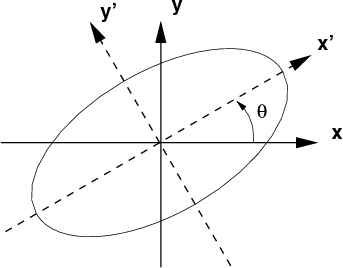
Par un changement de repère adéquat, à savoir une rotation d’un angle θ défini par
 | (52) |
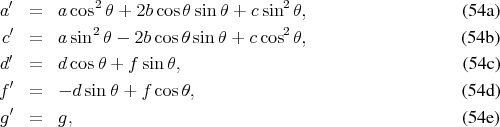
on fait disparaître le terme croisé xy et on se ramène à une équation dans le nouveau repère (x′Oy′) de la forme
 | (53) |
 | (55) |
Après avoir calculé la courbe dans le repère (x′0y′), on trouve les coordonées de ses points dans le repère (xOy) à l’aide de la transformation
 | (56) |
Plusieurs types de coniques peuvent être rencontrés :