 d’un angle
θ, alors les nouvelles
coordonnées de M
sont :
d’un angle
θ, alors les nouvelles
coordonnées de M
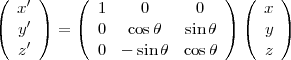
sont :Soit M un
point de coordonnées (x,y,z)
dans le repère d’origine. Si le repère
effectue une rotation autour de l’axe d’un angle
θ, alors les nouvelles
coordonnées de M
sont :
|
(43) |
Si le repère effectue une rotation
autour de l’axe  d’un angle θ, alors les nouvelles
coordonnées de M
sont :
d’un angle θ, alors les nouvelles
coordonnées de M
sont :

|
(44) |